
Domaines de recherche
L'ambition de PICS-L est de produire des connaissances et des outils pour améliorer la sécurité et le confort des déplacements individuels tout en préservant l'environnement, l'enjeu étant d'accompagner l'évolution des mobilités dans le contexte de transitions écologique, énergétique et numérique. On s'intéresse plus particulièrement aux automobilistes, aux modes actifs, ainsi qu'aux véhicules automatisés, qu'on considère comme de futurs usagers.
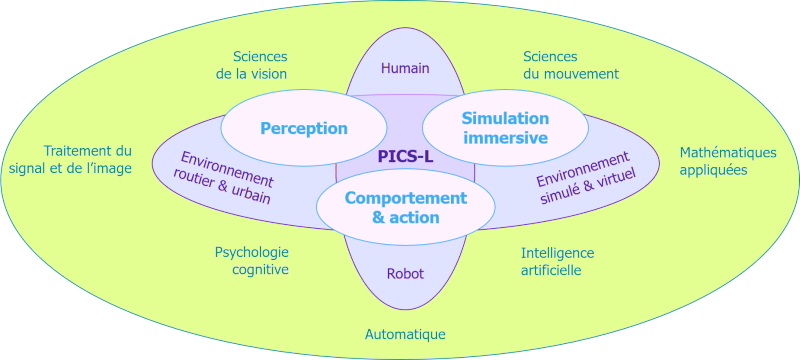
Les recherches conduites par PICS-L se répartissent dans trois domaines transversaux qui couvrent différents aspects de la boucle perception-action qui est à la base de la locomotion : la perception, le comportement et l'action, et la simulation immersive. Nos travaux se déclinent dans deux dimensions : entre l'humain et le robot d'une part, et entre l'environnement de déplacement réel et simulé d'autre part.
Dans le domaine "perception", on s'intéresse au fonctionnement des systèmes de prise d'information, surtout visuels, et aux phénomènes qui perturbent ce fonctionnement en situations difficiles, notamment du fait de conditions d'éclairage et de visibilité défavorables. On traite de la vision humaine, et de la vision par ordinateur, le point commun étant le "signal" visuel dont on doit extraire l'information utile. Dans les deux cas, on cherche à caractériser et à améliorer l'offre de visibilité dans l'environnement de déplacement, en utilisant des images entre “réelles” collectées en laboratoire, sur piste ou sur route ouverte, mais également des images produites par simulation numériques.
Dans le domaine "comportement et action", on s'intéresse aux interactions entre un usager, son véhicule, l'infrastructure, et les autres usagers, dans des scénarios porteurs d'enjeux pour la sécurité, l'exploitation ou l'environnement. On traite du comportement humain, notamment de ses déterminants psychologiques, mais aussi de la dynamique des systèmes, en vue notamment de les contrôler.
Et dans le domaine "simulation immersive", on s'intéresse à la fidélité des dispositifs de réalité virtuelle et de simulation des déplacements qui permettent d'étudier la perception et le comportement en conditions contrôlées et répétables. On traite de l'humain dans la boucle, mais aussi du logiciel dans la boucle, car si la simulation est incontournable pour étudier le comportement en conditions contrôlées et répétables, elle l'est tout autant pour évaluer la fiabilité des systèmes automatisés, notamment lorsqu'ils font appel à l'intelligence artificielle. Pour s'assurer que les comportements observés en simulation sont conformes à ceux qui seraient observés en situation réelle, on réalise autant que possible des comparaisons réel-simulé.